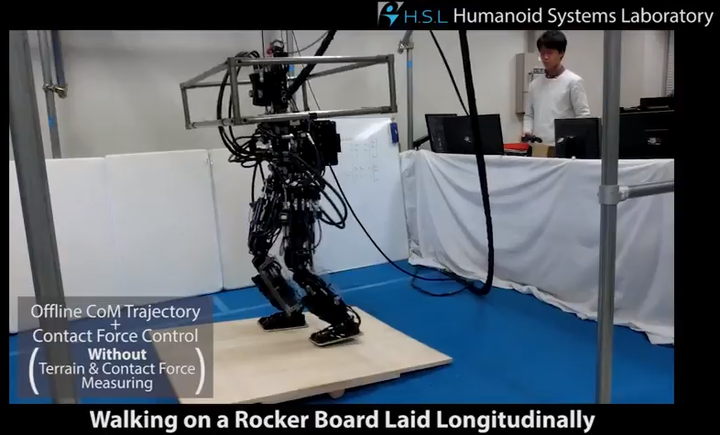
平山 健太全身力制御による油圧二足歩行ロボットの適応的歩行最適接触力制御と全身トルク制御によって力学的に自然な動作が可能となり、段差や不安定な路面に対しても柔軟な歩行を実現しました。humanoidsystems.org でさらに詳しく